

Autonomous mobile robots (AMR) are mobile robots that can navigate around uncontrolled environments without the need for any physical guidance or electromagnetic devices. They are being used indoors and outdoors to transport goods from one point to another.
AMR is used in production facilities, last-mile delivery, storage facilities, and even as a disinfection robot during the Covid-19 pandemic. AMR has been planned to use inside elderly care home Riihikoti to transport food carts from the central kitchen to distribution points.
AMRs rely on maps generated using simultaneous localization and mapping (SLAM). In the SLAM technique, the robot figures out a map from the obstacles it sees from its sensors and, simultaneously, moves within this map. To understand slam, imagine that you are moving inside your office building. Using the sensory input of your eyes, you know where you are located according to specific features like walls, tables, and doors. Our brain stores information about the layout of the office space, and moving around our office space is no issue. Our brain stores information on where things were, and if there are some changes, we notice it, and this updated information on what was changed is stored in our memory. Our brain computes necessary information and memory management without our realization. SLAM is an engineering technique to bring this behavior to mobile robots.
SLAM technique allows us to create maps of indoor buildings with a mobile robot from places where original blueprints aren’t available. Although AMRs are equipped with various sensors (e.g., ultrasound, laser, stereo vision, and GPS) to detect obstacles, how can a robot recognize moving obstacles (i.e., people, pets, or other robots) from static obstacles, for example, walls? Thus, the data acquired from AMR needs to be cleaned after the robot has created this map. Usually, the technician cleans the map by double-checking what corresponds to static obstacles and what can be removed from the map
In this specific case, we implemented a simple technique to incorporate an existing map of a building (blueprint) so that the AMR can use this map as a basis for its navigation. SLAM is then used to update the map only by adding moving objects. The AMR (MIR200) navigation around Riihikoti was tested with our method. The engineering floor plans of Riihikoti contained all the information on walls, stairs, elevators, and all the zones. A comparison of floor plans (Figure 1), AMR scanned map (Figure 2), and edited floor plans map (Figure 3) can be seen below. The edited map contains more precise information than the map scanned autonomously by the robot. The edited map allows the robot to operate more safely in its environment.
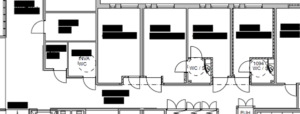
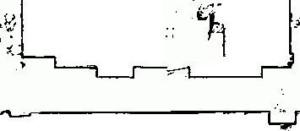

Our method succeeded in loading floor maps of different floors to AMR without having it scan all the places. In addition, this method makes it convenient for end-users to recognize locations, plan zones and create a mission for AMRs.
Authors:
Narayan Panthi, Project Engineer, HAMK Tech Research Unit, Robotics Research Group
Milan Gautam, Development Engineer, HAMK Tech Research Unit, Robotics Research Group



{kind=link}